Journal of NeuroEngineering and Rehabilitation
Autonomous multi-joint soft exosuit with augmentation-power-based control parameter tuning reduces energy cost of loaded walking
- Sangjun Lee,
- Jinsoo Kim†,
- Lauren Baker†,
- Andrew Long,
- Nikos Karavas,
- Nicolas Menard,
- Ignacio Galiana and
- Conor J. Walsh
†Contributed equally
Journal of NeuroEngineering and Rehabilitation201815:66
© The Author(s). 2018
- Received: 15 December 2017
- Accepted: 3 July 2018
- Published: 13 July 2018
Abstract
Background
Soft exosuits are a recent approach for assisting human locomotion, which apply assistive torques to the wearer through functional apparel. Over the past few years, there has been growing recognition of the importance of control individualization for such gait assistive devices to maximize benefit to the wearer. In this paper, we present an updated version of autonomous multi-joint soft exosuit, including an online parameter tuning method that customizes control parameters for each individual based on positive ankle augmentation power.
Methods
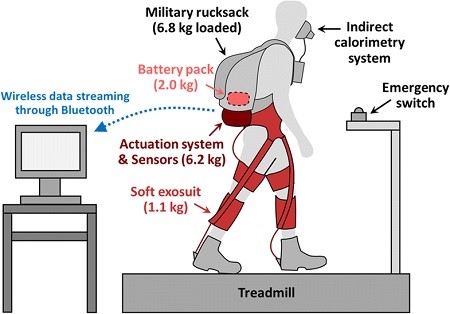
The soft exosuit is designed to assist with plantarflexion, hip flexion, and hip extension while walking. A mobile actuation system is mounted on a military rucksack, and forces generated by the actuation system are transmitted via Bowden cables to the exosuit. The controller performs an iterative force-based position control of the Bowden cables on a step-by-step basis, delivering multi-articular (plantarflexion and hip flexion) assistance during push-off and hip extension assistance in early stance. To individualize the multi-articular assistance, an online parameter tuning method was developed that customizes two control parameters to maximize the positive augmentation power delivered to the ankle. To investigate the metabolic efficacy of the exosuit with wearer-specific parameters, human subject testing was conducted involving walking on a treadmill at 1.50 m s− 1 carrying a 6.8-kg loaded rucksack. Seven participants underwent the tuning process, and the metabolic cost of loaded walking was measured with and without wearing the exosuit using the individualized control parameters.
Results
The online parameter tuning method was capable of customizing the control parameters, creating a positive ankle augmentation power map for each individual. The subject-specific control parameters and resultant assistance profile shapes varied across the study participants. The exosuit with the wearer-specific parameters significantly reduced the metabolic cost of load carriage by 14.88 ± 1.09% (P = 5 × 10− 5) compared to walking without wearing the device and by 22.03 ± 2.23% (P = 2 × 10− 5) compared to walking with the device unpowered.
Conclusion
The autonomous multi-joint soft exosuit with subject-specific control parameters tuned based on positive ankle augmentation power demonstrated the ability to improve human walking economy. Future studies will further investigate the effect of the augmentation-power-based control parameter tuning on wearer biomechanics and energetics.
Keywords
- Exosuit
- Assistance
- Control
- Tuning
- Augmentation power
- Metabolic cost






















.png)








No hay comentarios:
Publicar un comentario